이미지 Processing¶
Goal¶
디지털 영상의 표현 방법에 대해서 알 수 있다.
Color-space중 Binary Image, Grayscale, RGB, HSV에 대해서 알 수 있다.
각 Color-space 변환 방법에 대해서 알 수 있다.
동영상에서 간단한 Object Tracking을 할 수 있다.
cv2.cvtColor(),cv2.inRange()함수에 대해서 알 수 있다.
Digital Image¶
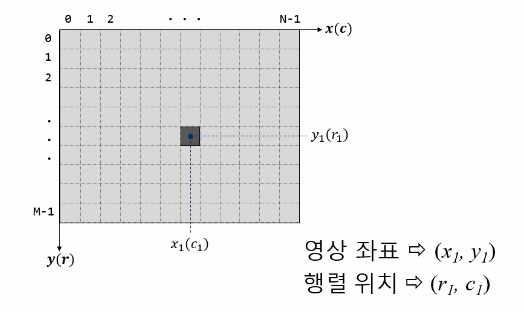
Pixel 표현 방법¶
Digital Image의 유형¶
Binary Image¶
Binary Image는 pixel당 1bit로 표현하는 영상을 의미합니다. 즉 흰색과 검은색으로만 표현이 되는 영상입니다.
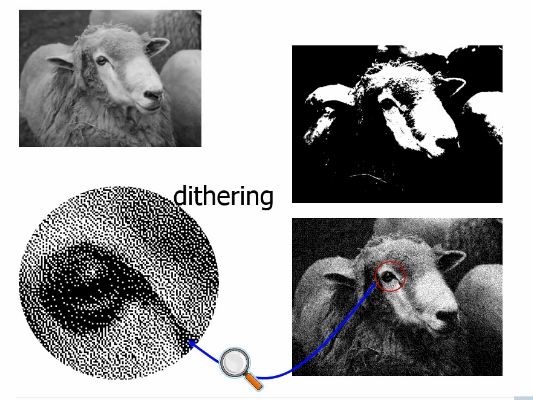
Binary Image¶
위 이미지에서 좌측 상단의 이미지가 원본 이미지 입니다. 원본 이미지를 thresholding처리를 하여 binary image로 변환한 결과가 우측 상단의 이미지 입니다. 우측 하단의 이미지는 화면에 표현할 때 사용하는 방법으로 binary image의 밀도를 조절하여 밝기를 표현 하는 방법입니다. 이를 dithering 이라고 합니다.
Grayscale Image¶
Grayscale Image는 Pixel당 8bit, 즉 256단계의 명암(빛의 세기)을 표현할 수 있는 이미지입니다.
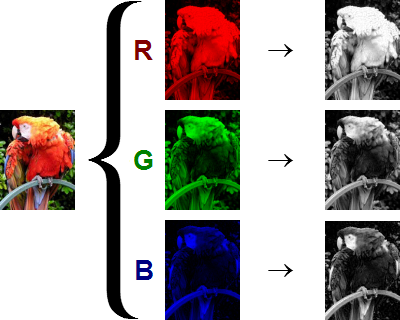
Color Image¶
Color 이미지는 pixel의 색을 표현하기 위해서 pixel당 24bit를 사용합니다. 총 16,777,216 가지의 색을 표현할 수 있습니다. 이것을 일반적으로 True color image라고 합니다. pixel은 RGB 각각을 위해서 8bit를 사용하게 됩니다. OpenCV에서는 BGR로 표현을 하기 때문에 Blue->(255,0,0), Green->(0,255,0), Red->(0,0,255), White->(255,255,255), Black->(0,0,0)으로 표현할 수 있습니다.
각 pixel당 3Byte를 사용하기 때문에 용량이 큽니다. 이를 해결하기 위해서 lookup table을 사용하여, 해당 pixel에는 index만 을 저장하기도 합니다.
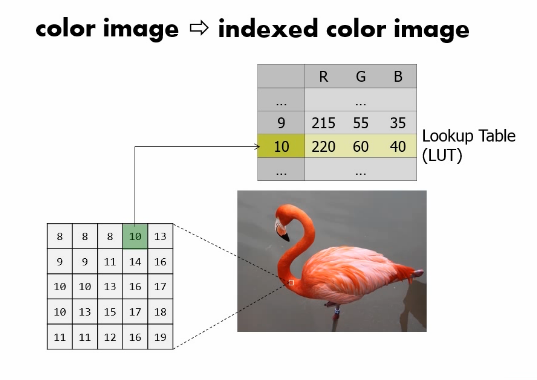
Indexed Color Image¶
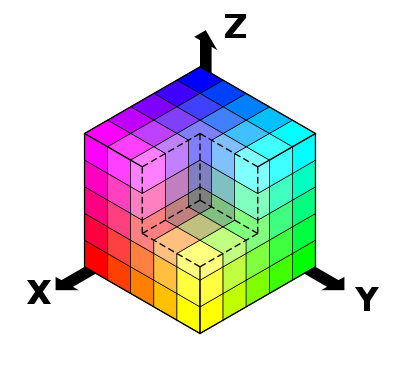
RGB Color-space¶
RGB 모델은 빛의 삼원색인 빨간색, 초록색, 파란색을 기본 색으로 사용을 합니다. 정육면체 모델 형태로 표현할 수 있습니다.
HSV Color-space¶
이미지 처리에서 가장 많이 사용되는 형태의 Color 모델입니다. 하나의 모델에서 색과 채도, 명도를 모두 알 수 있습니다. 원뿔 형태의 모델로 표현이 됩니다.
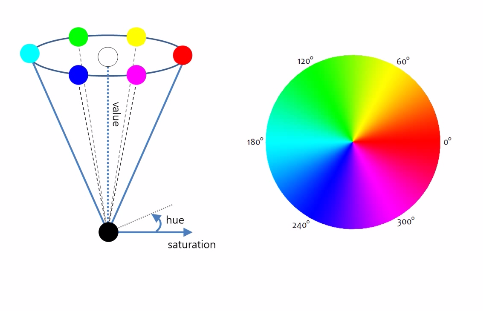
HSV 모델¶
HSV의 의미는 다음과 같습니다.
H(ue) : 색상. 일반적인 색을 의미함. 원추모형에서 각도로 표현이 됨.(0: Red, 120도 : Green, 240: Blue)
S(aturation) : 채도. 색읜 순수성을 의미하며 일반적으로 짙다, 흐리다로 표현이 됨. 중심에서 바깥쪽으로 이동하면 채도가 높음.
V(alue) : 명도. 색의 밝고 어두운 정도. 수직축의 깊이로 표현. 어둡다 밝다로 표현이 됨.
Color-space 변환¶
OpenCV에는 150여가지 변환 방법이 있습니다. 아래는 변환 방법을 확인하는 코드 입니다.
>>> import cv2
>>> flags = [i for i in dir(cv2) if i.startswith('COLOR_')]
>>> print flags
그 중에 서 많이 사용되는 BGR<->Gray, BGR<->HSV에 대해서 알아 보겠습니다.
변환을 위해서 사용하는 함수는 cv2.cvtColor() 함수 입니다.
- cv2.cvtColor(src, code)¶
- Params src
image
- Params code
변환 코드
BGR->Grayscale로 변환하기 위해서는 cv2.COLOR_BGR2GRAY 를 사용합니다. BGR->HSV로 변환하기 위해서는 cv2.COLOR_BGR2HSV 를 사용합니다.
Note
Hue는 [0,179], Saturation은 [0,255], Value는 [0,255]로 표현이 됩니다.
Object Tracking¶
다음 예제는 단순한 Object Tracking입니다. 영상에서 파란색 부분을 찿아서 binary image로 보여줍니다.
Video로 부터 Frame을 읽어 들입니다.
frame을 HSV로 변환을 합니다.
변환한 이미지에서 blue 영역을 찾아서 mask를 생성합니다.
frame에 mask를 적용하여 이미지를 보여 줍니다.
Code는 아래와 같습니다.
Sample Code
1#-*- coding: utf-8 -*-
2import cv2
3import numpy as np
4
5# Camera 객체를 생성 후 사이즈르 320 X 240 으로 조정.
6cap = cv2.VideoCapture(0)
7cap.set(3,320)
8cap.set(4,240)
9
10while(1):
11 # camera에서 frame capture.
12 ret, frame = cap.read()
13
14 if ret:
15
16 # BGR->HSV로 변환
17 hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
18
19 # blue 영역의 from ~ to
20 lower_blue = np.array([110, 50, 50])
21 upper_blue = np.array([130, 255, 255])
22
23 #이미지에서 blue영역
24 mask = cv2.inRange(hsv, lower_blue, upper_blue)
25
26 #bit연산자를 통해서 blue영역만 남김.
27 res = cv2.bitwise_and(frame, frame, mask = mask)
28
29 cv2.imshow('frame', frame)
30 cv2.imshow('mask', mask)
31 cv2.imshow('res', res)
32
33 if cv2.waitKey(1) & 0xFF == 27:
34 break
35
36cap.release()
37cv2.destroyAllWindows()
Result
참고로 HSV의 색 영역을 확인하는 방법은 아래와 같습니다.
>>> green = np.uint8[[[0,255,0]]]
>>> green_hsv = cv2.cvtColor(green, cv2.COLOR_BGR2HSV)
>>> print green_hsv
[[[60, 255, 255]]]
위 결과에서 [H-10,100,100]과 [H+10,255,255]와 같이 상하한선을 정하여 색 영역 범위를 확인할 수 있습니다.